Diploma Thesis Project: CAiRO
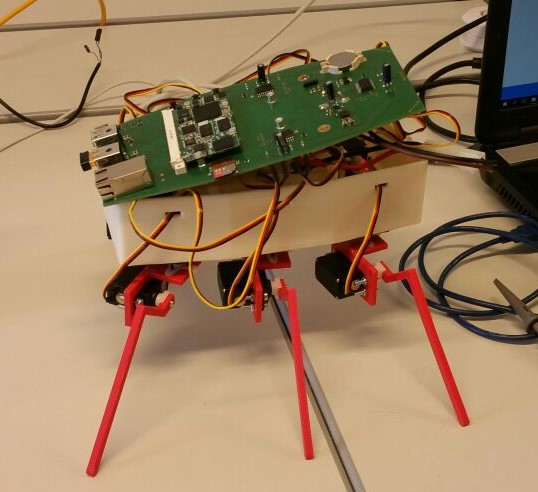
The CAiRO (CrAwling Insectoid RObot) project has been a Matura Thesis Project at the HTL Rennweg in Vienna in 2017. The goal was to build a six-legged robot, which could be controlled by a remote application running on a Desktop or Laptop. Both Theobroma Systems and Modellbau Kirchert supported the project with financial funds and knowledge.
The Team
| Name | Position | Contact | Supporting Teacher |
|---|---|---|---|
| Manuel Federanko | Programmer | federanko.manuel[at]gmail.com | DI Herbert Fleck |
| Moritz Merlin Mießkes | Project Manager | DI DR Christoph Grinschgl | |
| Marc Oppolzer | Mechanical Engineer | DI Wolfgang Steinwender | |
| Nicolas Oswald | Electrical Engineer | DI Martin Meschik |
Vid 1.: Video of the robot walking
Resources
- Complete documentation: cairo-doc.pdf
- Sourcecode: github.com/cairobot
- Theobroma Systems: www.theoborma-systems.com
- Modellbau Kirchert: www.kircher.com